机器人身上开始出现越来越多的仿人关节,这在让它们更灵活的同时,也意味着要铆更多的螺丝钉。
这给维护人员增加了不少工作量,必须要花费大量时间去检查和维修,给机器人拧螺丝。
东京大学的研究人员 Takayuki Murooka、Kei Okada 和 Masayuki Inaba 意识到了这个问题,经过一系列研究之后,他们教会了机器人自己拧紧螺丝,而且,机器人还顺便学会在自己背上安了一个挂钩,方便人们挂包包。
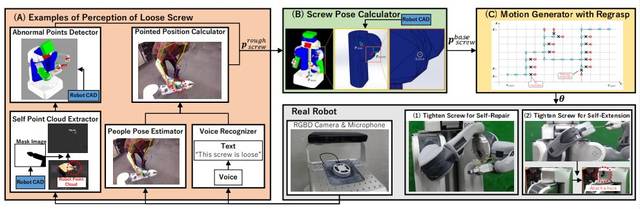
研究团队向机器人输入了 CAD 数据,这样机器人就准确地知道了所有螺丝钉的位置。
尽管它不能直接检测出自己的哪一颗螺丝钉出了问题,但是如下图所示,它能通过机器人连杆的姿态来判别自己的物理姿势和数字模型是否匹配,如果不匹配的话,它会知道自己的骨架有点散了。之后它利用 CAD 数据计算出要拧紧的螺丝的位置,然后上紧螺丝。
或者别人告诉它哪一个螺丝松了,根据触发器的信息,机器人可以大致算出螺丝的位置,它也会自己重新上紧。